黑白相机成像原理
工业相机是机器视觉系统中的一个关键组件,其最本质的功能就是将光信号转变成有序的电信号。选择合适的相机也是机器视觉系统设计中的重要环节,相机的选择不仅直接决定所采集到的图像分辨率、图像质量等,同时也与整个系统的运行模式直接相关。

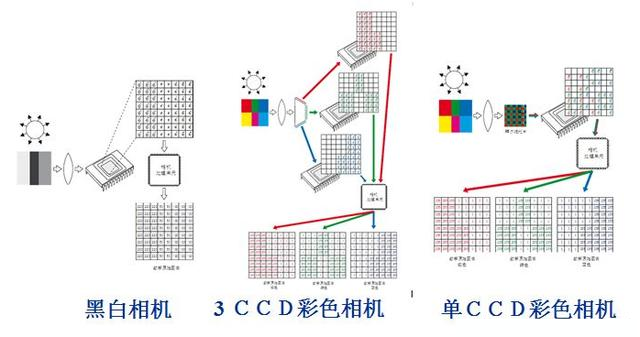
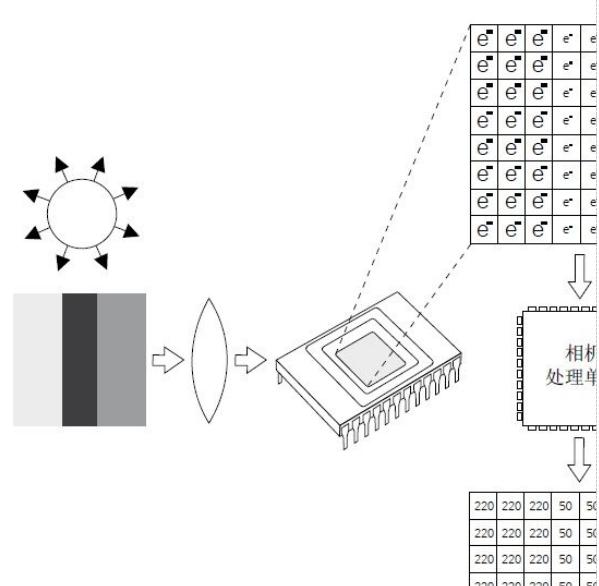
我们首先从相对简单的黑白数字相机入手。如下图所示,物体在有光线照射到它表面时将会产生反射,这些反射光线进入镜头光圈照射在CCD芯片上,在感应元件产生对应的电荷,电流大小与光强对应。曝光结束后,这些电荷被读出,并由相机内部的微处理器进行初步处理,存储到存储介质当中,此时由该微处理器输出的就是一幅数字图像了。
CCD彩色成像原理
CCD芯片按比例将一定数量的光子转换为一定数量的电子,但光子的波长,也就是光线的颜色,却没有在这一过程中被转换为任何形式的电信号,因此CCD实际上是无法区分颜色的。
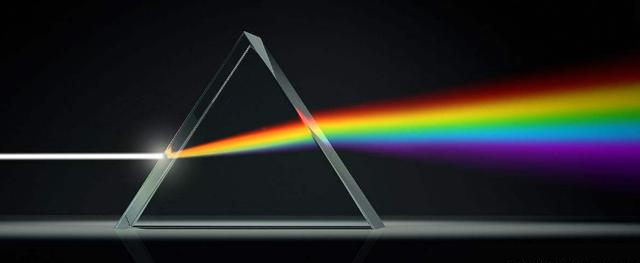
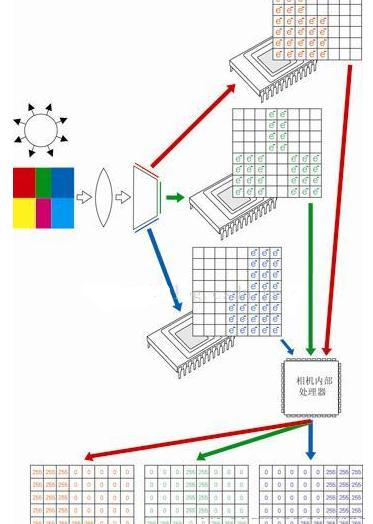
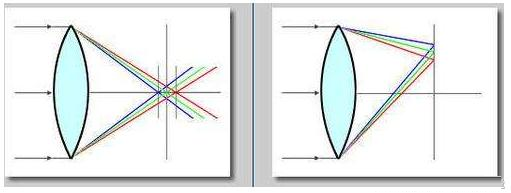
在这种情况下,如果我们希望使用CCD作为相机感光芯片,并输出红、绿、蓝三色分量,就可以采用一个分光棱镜和三个CCD,如下图所示。棱镜将光线中的红、绿、蓝三个基本色分开,使其分别投射在一个CCD芯片上。
这样以来,每个CCD就只对一种基本色分量感光。这种解决方案在实际应用中的效果非常好,但它的最大缺点就在于,采用3个CCD和棱镜的搭配必然导致价格昂贵。因此科研人员在很多年前就开始研发只使用一个CCD芯片也能输出各种彩色分量的相机。
三棱镜方式:
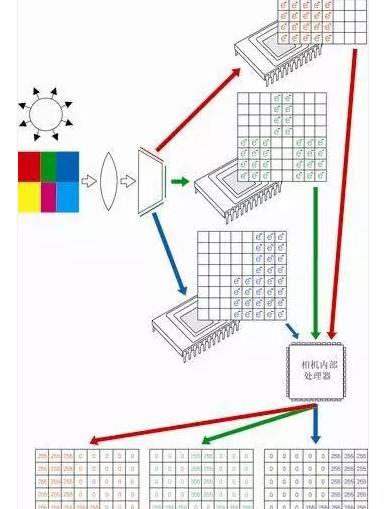
为了获取光线的颜色信息,可以使用三棱镜将光束分成单色光,然后分别成像,三棱镜方式就是这个原理。它从镜头射入的光分成三束,每束光都由不同的内置光栅来过滤出某一种三原色,然后使用三块CCD分别感光。这些图象再合成出一个高分辨率、色彩精确的图象。
滤光片方式:
由于每个感光元件对应图像传感器中的一个像点,且只能感应光的强度,无法捕获色彩信息,因此必须在感光元件上方覆盖彩色滤光片。最常用的做法是覆盖RGB红绿蓝三色滤光片,以1:2:1的构成由四个像点构成一个彩色像素(即红蓝滤光片分别覆盖一个像点,剩下的两个像点都覆盖绿色滤光片),采取这种比例的主要原因是人眼对绿色较为敏感。

单CCD彩色成像原理
如果在CCD表面覆盖一个只含红绿蓝三色的马赛克滤镜,再加上对其输出信号的处理算法,就可以实现一个 CCD 输出彩色图像数字信号。由于这个设计理念最初由拜尔(Bayer)先生提出,所以这种滤镜也被称作拜尔滤镜。
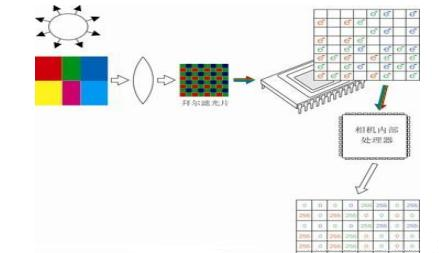
如上图所示,该滤镜的色彩搭配形式为:一行使用蓝绿元素,下一行使用红绿元素,如此交替;换言之,CCD中每4个像素中有2个对绿色分量感光,另外两个像素中,一个对蓝色感光、一个对绿色感光。从而使得每个像素只含有红、绿、蓝三色中一种的信息,但我们希望的是每个像素都含有这三种颜色的信息。
所以接下来要对这些像素的值使用"色彩空间插值法"进行处理。以上图左下角的红色区域为例,我们需要的是丢失了的绿色与蓝色的值。而插值法可以通过分析与这个红色像素相邻的像素计算出这两个值。

在这个例子中,算法发现该区域像素总绿色像素均含有大量电荷,但蓝色像素所含电荷数为零,所以可以计算出,这个红色像素实际上是黄色的。如果对3CCD的成像结果与单 CCD+色彩插值处理后的结果进行比较,我们将发现所得图片完全一致。但该结论仅对当前的图像成立!因为这副图片色彩对比简单、边界规则。
而在实际应用中,即使最成熟的色彩插值算法也会在图片中产生低通效应。所以,单 CCD彩色相机生成的图片比3CCD彩色相机生成的图片更加模糊,这点在图像中有超薄或纤维形物体的情况下尤为明显。

但是,单CCD彩色相机使CCD数字相机的价格大大降低,而且随着电子技术的高速发展,CCD的质量都有了惊人的进步,因此大部分彩色数码相机都采用了这种技术。